ラベル貼付装置は、剥離紙の上に付いているタック(粘着材付)ラベルを剥離板で剥離紙から剥がし、ワーク(被着体)に自動で貼り付ける装置です。
その目的に応じ、多種多様な貼り付ける機構を用意しています。
ラベル貼付装置
ラベル貼付装置の構造
概要
ローラータイプ
ラベルは、台紙を引く事により剥離板で台紙から剥がれます。
ワーク(被着体)はラベルと同じ速度で搬送され、「圧着ローラー」でラベルが貼られます。
ラベルとワークは、それぞれセンサーで同期をとります。
ワークを搬送させながらラベルを貼るため 処理速度を速めることが出来ます。
ラベル貼付精度は、ラベルの送り出し及び、ワーク搬送精度に影響される事を考慮する必要があります。
ラベル貼付装置(ラベラー)としては、基本的な装置です。
エアージェットタイプ
ラベルは、台紙を引く事により剥離板で台紙から剥がれ、エアーヘッドに吸着します。
ワーク(被着体)がエアーヘッド部に移動した瞬間に、空気圧(エアージェット)でラベルを飛ばしながら、ワークに貼り付けます。
但し、空気でラベルを飛ばすため、ラベル貼付け精度は低くなります。
空気でラベルを圧着するため、変形しやすいワークに使用されます。
食品(惣菜等)のトレー包装への商品ラベル、POSラベル貼付けに適しています。
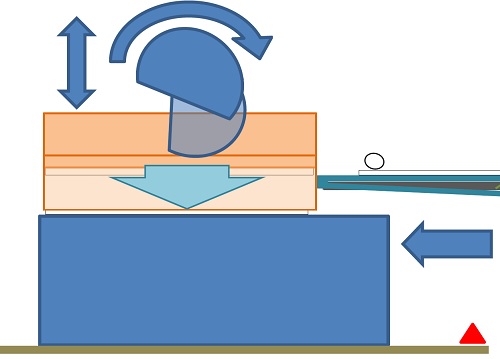
シリンダータイプ
ラベルは、台紙を引く事により剥離板で台紙から剥がれ、貼付けヘッドに吸着します。
ワーク(被着体)がワークストッパーで停止した時に、エアーシリンダーを押し下げし、ラベル貼付けヘッドでラベルをワークに押しつけて貼り付けます。
ワークを停止させ、ラベル貼付けヘッドに固定したラベルを圧着するため、ラベル貼付け精度を高める事が出来ます。
ワークの凹部・凸部への貼付け、銘板等、ラベル貼付け位置精度を求める場合に適しています。
また、ラベル位置精度を上げるオプション装置を使用する事により、より高精度な貼付けを可能にします。
シリンダーローラータイプ
ラベルは、台紙を引く事により剥離板で台紙から剥がれ、貼付けヘッドに吸着します。
次に、エアーシリンダーを押し下げ、ラベル貼付けヘッドのローラーを使って、ラベルをワークに貼り付けます。
ワークを搬送させながらラベルを貼るため 処理速度を速めることが出来ます。
ラベル貼付精度を求める場合は、一旦ワークを停止させてから、貼付けヘッドを動かす事で、解決することができます。
ラベル貼付装置(ラベラー)としては、一般的な装置です。
カムタイプ
カムタイプは、シリンダータイプの高速対応機です。
ラベルは、台紙を引く事により剥離板で台紙から剥がれ、貼付けヘッドに吸着します。
カム機構でラベルヘッドを押し下げし、ラベルをワーク(被着体)に押しつけて貼り付けます。
カムの回転を利用するため、処理速度を要求される場合に適しています。
ローラータイプでは実現できない、精度の高い貼付け要求に対応します。
別途オプション装置を使用する事により、より高精度な貼付けを可能にします。
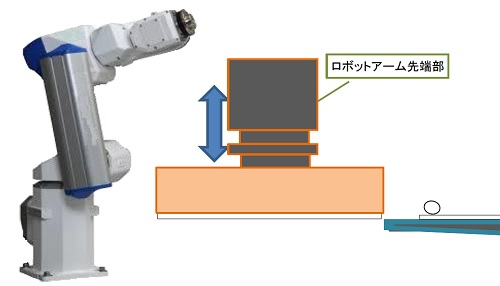
ロボットタイプ
ロボットタイプは、台紙から剥がされたラベルを、ロボットアーム先端に取り付けた貼付けヘッドで吸着し、ワーク(被着体)に貼り付ける装置です。
使用するロボットは、要求仕様により垂直多関節、水平多関節、パラレルリンク、直行ロボット等から選択します。
ロボットの可動範囲であれば、ワークの様々な場所にラベルを貼り付ける事が出来ますが、ロボット制御(ティーチング)が複雑になります。
また、ロボットの可動範囲に対し、安全装置の設置が必要となります。
貼付け精度
ラベル貼付装置の貼付け精度は、貼付機と貼付時のワーク(被着体)の停止位置で設定されます。
貼付精度は、多くはワークへの貼付位置に対し、前後・左右及び貼付け角度の3点です。
ラベル貼付装置の構造により、精度の値は変わります。
また、貼付時の製品位置(前後、左右、角度)、ラベル製造時の精度(台紙上のラベル位置、抜き加工の抜型角度、ラベル間隔等)も、重要な要素となります。
ラベル貼付機別の精度
| ローラータイプ | × |
製品を搬送しながら、ラベルを剥がしつつ、裏面の粘着材をローラーでワーク(被着体)に押して貼ります。
ワークの搬送速度とラベルの剥離速度、粘着材の押し付け度合いは、搬送時に外因で変化してしまいます。
| エアージェットタイプ | × |
このタイプの多くはワーク(被着体)を搬送させながら、ラベルをエアージェットで飛ばし、ラベル裏面の粘着材で、ワークにラベルを貼り付けます。
エアージェットでラベルを飛ばしているため、ワークとの距離や環境(風、振動等)に影響されます。
| シリンダータイプ・カムタイプ | 〇 |
ラベルを剥離紙から剥がし、貼付けヘッドで吸い付け、製品を止めて、貼付けヘッドをワーク(被着体)に押し当て、ラベルを貼り付けます。
ワークを止めてから貼り付ける場合は、搬送時に発生する外因の影響は受けにくい構造です。
ただし、ワーク停止位置のばらつきが発生することもあります。
高い貼付け精度が要求される場合には、ラベル位置の制御装置追加、ワーク停止位置制御を追加する事が必要です。
| シリンダーローラータイプ | △ |
ラベルを剥離紙から剥がし、貼付けヘッドで吸い付け、搬送中のワーク(被着体)に貼付けヘッドをエアシリンダーで傾け、ローラーでワークに押し当てラベルを貼り付けます。
貼付け強度を高くする事が出来ますが、搬送精度が影響します。ワークを停止させ、貼付けヘッドを動かす事で、貼付け強度、精度ともに向上する事は可能です。
ただし、貼付け速度は低くなってしまいます。
シリンダータイプと同じように、ラベル位置制御、製品搬送の位置制御を行う事で、さらに貼付け精度を高めることが可能です。
資料